《Practical WPF Charts and Graphics 》翻译——之八
旋转
假设你想将一个对象顺时针旋转θ角。首先,假设你有了一个点(x1,y1),你想旋转θ角来得到点(x2,y2),如图2-3所示:
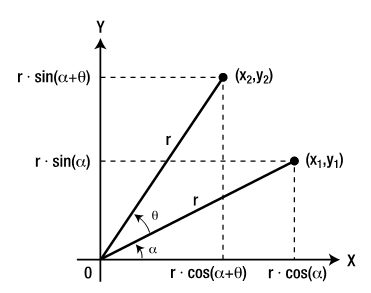
图2-3 从点(x1,y1)旋转到(x2,y2)
从点到原点的距离记为r。于是我们得到下面的关系:
点(x2,y2)是另外一个角度θ旋转得到的同样的点。既然这个点也有一个到原点的距离r,它的坐标可以表示为

将x1=rcosα和y1=rsinα带入前面的方程有
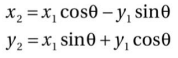
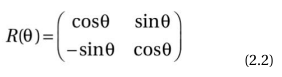
用矩阵的形式表示,将点(x1,y1)旋转到(x2,y2)可得到下面的旋转矩阵:
平移
为了平移一个对象,你可以简单的给构成对象的点的X和Y坐标增加一个偏移量:
尽管平移看起来简单,但是它却不能用变换矩阵表示。可以将拉伸,反射和旋转表示成矩阵,而把平移却别表示。然而,这样做将会导致很痛苦的簿记(bookkeeping),特别是一个包含很多变换的应用程序里。你可以使用一种将计算移到更高维度的技术来替代。这种技术允许你一致和同样地对待每一个不同的变换。这个叫做齐次坐标系的方法,已经成为几乎每一个图形程序的标准。在下面的章节里,会允许里通过矩阵操作所有变换。
齐次坐标系
我们期望所有2D空间的变换,包括拉伸、反射、旋转和平移,如果在齐次坐标系里表示点,都能相同地对待。齐次坐标系首先在几何学中被引进,随后被应用到图形呈现里。
在齐次坐标系里,你添加第三个坐标到一个点。每一个点被表示成三个坐标(X,Y,W)而不是一对坐标(X,Y)。如果W坐标非零,你可以除以它;(X,Y,W)和(X/W,Y/W,1)是相同的表示。当W非零的时候,你可以正常表示这个除法,数X/W和Y/W通常叫做齐次坐标系里的点坐标。当W=0的时候叫做无穷处的点。
既然2D空间的向量和点现在是3个元素的列向量,乘以一个向量来产生另一个向量的变换矩阵,应该是3*3的了。
齐次坐标系里的变换
在齐次坐标系中,一个变换可以表示成下面的形式:
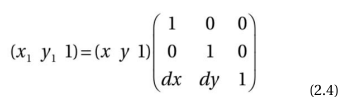
这个变换可以用不同方式表示成

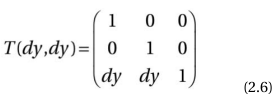
这里P和p1分别表示点(x,y)和(x1,y1),T(dx,dy)是下面的变换矩阵:
如果一个点P通过T(dx1,dy1)平移到p1,然后被T(dx2,dy2)平移p2会发生什么?结果就像你期望的,是网状的平移T(dx1+dx2,dy1+dy2)。这可以通过下面的定义证明:
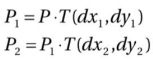
通过前面的方程我们可以得到

矩阵得到T(dx1,dy1) T(dx2,dy2)是

网状平移确实是T(dx1+dx2,dy1+dy2)。