基于s3c2440的简易bootloader实现
一、目的
编写一个能够加载并启动OS内核的bootloader。
二、思路
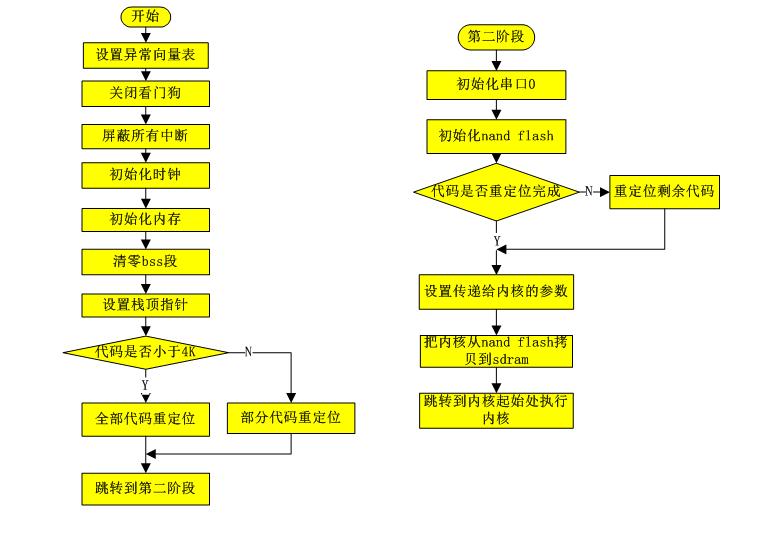
第一阶段:
(1)arm920t的异常向量表有两种存放方式,一种是低端存放(从0x00000000处开始存放),另一种是高端存放(从0xfff000000处开始存放)。选择低端存放,建立异常向量表。
(2)s3c2440的看门狗在上电启动时默认是开启的,所有要先把看门狗关了先。免得代码运行还没完成就强制复位。
(3)屏蔽掉所有中断。
(4)初始化时钟。
(5)初始化内存。
(6)清零bss段。
(7)设置好各个模式下的栈空间。
(8)重定位代码,使得代码的运行地址与链接地址相对应,之后就可以直接使用绝对地址。
(9)使用绝对跳转指令跳转到第二阶段,用c语言来实现。
第二阶段:
(1)初始化串口0,一方面方便我们的调试,一方面也为内核启动时打印信息做好初始化。
(2)初始化nand flash,需要把nand flash里的内核镜像拷贝到内存。
(3)把内核镜像拷贝到内存指定位置。
(4)设置好传递给内核的参数,并放置在约定的位置。
(5)跳转到内核起始地址处开始启动内核。
完毕。
三、流程图设计
四、代码树结构
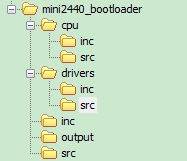
(1)drivers里的src目录放置与外围设备相关配置的编程文件,inc目录放置相关头文件。对应的makefile放在drivers目录里。
①drivers/Makefile
#把src目录下的所有.c文件的字符串替换成.o字符串
TARGET := $(patsubst %.c,%.o,$(notdir $(wildcard ./src/*.c)) )
TARGET += $(patsubst %.S,%.o,$(notdir $(wildcard ./src/*.S)) )
all:$(TARGET)
echo "$(TARGET) 编译完成"
GPATH=$(PWD)
vpath %.c ./src
vpath %.S ./src
%.o:%.c
$(CC) $(INCLUDES) $(CPPFLAGS) $(CFLAGS) -c -o $@ $<
%.o:%.S
$(CC) $(INCLUDES) $(CPPFLAGS) $(CFLAGS) -c -o $@ $<
clean:
rm -f *.o
②drivers/inc
nand.h
#ifndef _NAND_H
#define _NAND_H
/**
*提取出页内列号,块内页号,块号
*/
#define dnand_addr2ColAddr(addr) (addr & 0x7FF)
#define dnand_addr2RowAddr(addr) (( addr & 0xFC00 ) >> 11)
#define dnand_addr2BlockAddr(addr) (addr >> 17)
//初始化NAND Flash , 时钟频率改变了这个一定要记得改
#define dnand_init() \
do{ \
NFCONT = 0x73;\
NFCONF = (3<<12) | (1<<8) | (1<<4);\
}while(0)
//复位
void fnand_reset(void);
//等待NAND Flash就绪
#define dnand_waitReady() while(!(NFSTAT & 0x1))
//发出片选信号
#define dnand_enable() (NFCONT &= ~(1<<1))
//取消片选信号
#define dnand_disable() (NFCONT |= (1<<1))
//发出命令
#define dnand_writeCmd(cmd) (NFCMMD = cmd)
//读数据
#define dnand_readData() (*(volatile unsigned char *)&NFDATA)
//写数据
#define dnand_writeData(data) *(volatile unsigned char *)&NFDATA = data
//写地址
#define dnand_writeAddr(addr) \
do{ NFADDR = addr & 0xff;\
NFADDR = (addr >> 8) & 0x0f; \
NFADDR = (addr >> 11) & 0xff;\
NFADDR = (addr >> 19) & 0xff;\
}while(0)
//擦除块
unsigned char fnand_eraseBlocks(unsigned int startBlockNum , unsigned int blockCount);
//从nand闪存里的sourAddr地址处读取size大小的数据到内存destAddr处。
void fnand_readOfSize(unsigned char *destAddr , unsigned int sourAddr , unsigned int size);
//。从内存sourAddr处读取size大小的数据到nand闪存里的destAddr地址处
unsigned char fnand_writeOfSize(unsigned char *sourAddr , unsigned int destAddr , unsigned int size);
#endif
uart0.h
#ifndef UART0_H
#define UART0_H
#define TXD0_READY (0x01<<1)
#define UBRDIV0_VAL (101250000UL/(115200*16)-1)
/**********初始化uart0中断的配置***********/
void uart0_init(void);
/*******把string消息通过uart0发送出去******/
void uart0_sent_msg(char *string);
void uart0_sent_byte(char byte);
/*打印hex数据*/
void uart0_sent_hex_word(unsigned int val);
#endif
③drivers/src
nand.c
#include "nand.h"
#include "s3c2440.h"
/**
* 复位
*/
void fnand_reset(void)
{
dnand_enable();
dnand_writeCmd(0xff); // 复位命令
dnand_waitReady();
dnand_disable();
}
/**
*块擦除函数
*/
unsigned char fnand_eraseBlocks(unsigned int startBlockNum , unsigned int blockCount)
{
unsigned int i;
dnand_enable();
for( i = 0 ; i < blockCount ; i++ ){
//发送擦除命令
dnand_writeCmd( 0x60 );
dnand_writeAddr( startBlockNum << 6 );
dnand_writeCmd(0xD0);
dnand_waitReady();
//读取状态
dnand_writeCmd( 0x70 );
if ( ( dnand_readData() & 0x01 ) ){
return 1;
}
startBlockNum += 1;
}
dnand_disable();
return 0;
}
void fnand_readOfSize(unsigned char *destAddr , unsigned int sourAddr , unsigned int size)
{
unsigned int j , col;
col = sourAddr & 0x7FF ; //该地址可能不是从页的0地址开始读 ,所以要先取出列地址
dnand_enable();
for( j = 0 ; j < size ; ){
//发出read命令
dnand_writeCmd( 0x00 );
dnand_writeAddr( sourAddr );
dnand_writeCmd( 0x30 );
dnand_waitReady( );
//开始读一页数据到destAddr里 ,
for( ; (col < 2048)&&(j<size) ; col++ ){
*destAddr++ = dnand_readData();
j++;
sourAddr++;
}
col = 0;
}
dnand_disable();
}
/**
*从内存的sourAddr处写入pageCount页数据到nand flash的destAddr地址处
*/
unsigned char fnand_writeOfSize(unsigned char *sourAddr , unsigned int destAddr , unsigned int size)
{
unsigned int col, j;
unsigned int startBlockNum , blockCount ,pageCount;
col = destAddr & 0x7FF ;
pageCount = size/2048 + ( (col)? 1 : 0 ) ;
startBlockNum = dnand_addr2BlockAddr( destAddr ) ;
blockCount = ( dnand_addr2RowAddr( destAddr ) + pageCount ) >> 6 ;
if ( ( dnand_addr2RowAddr( destAddr ) + pageCount ) & 0x3F ){
blockCount++;
}
if ( fnand_eraseBlocks( startBlockNum , blockCount ) ){
return 1;
}
dnand_enable();
for( j = 0 ; j < size ; ){
//发出read命令
dnand_writeCmd( 0x80 );
dnand_writeAddr( destAddr );
//开始写一页数据到destAddr里
for( ; (col < 2048)&&(j < size) ; col++ ){
dnand_writeData( *sourAddr++ );
destAddr++;
j++;
}
col = 0;
dnand_writeCmd( 0x10 );
dnand_waitReady();
//发送读取状态命令
dnand_writeCmd( 0x70 );
if ( ( dnand_readData() & 0x01 ) ){
return 1;
}
}
dnand_disable();
return 0;
}
uart0.c
#include "Uart0.h"
#include "s3c2440.h"
/*
****************************************
初始化uart0中断的配置
****************************************
*/
void uart0_init(void)
{
GPHCON |= 0xa0;
GPHUP |= 0x0f;
ULCON0 = 0x03; //普通模式,禁止奇偶校验,1个结束位,8-bit字长
UBRDIV0 = UBRDIV0_VAL; //波特率选择115200,所以UBRDIV0=54
UCON0 = 0x005; //时钟源=PCLK
//Rx,Tx水平触发,禁止接收超时中断,禁止接收错误状态中断,
//不使用回路模式,不发送break信号
//中断方式发送接收数据到缓冲寄存器
}
/*
*****************************************************
*uart0发送消息
***************************************************
*/
void uart0_sent_msg(char *string)
{
do {
while( !(UTRSTAT0&TXD0_READY) );
UTXH0 = *string++;
}while(*string != '\0');
}
void uart0_sent_byte(char byte)
{
while(!(UTRSTAT0&TXD0_READY));
UTXH0 = byte;
}
void uart0_sent_hex_word(unsigned int val)
{
char i ,j;
uart0_sent_msg("0x");
for ( i = 0 ; i < 8 ; i++) {
j = (char)((val >> ((7-i)*4) ) & 0x0f);
if( (j >= 0) && ( j <= 9)) {
uart0_sent_byte('0'+j);
}else{
uart0_sent_byte('A'+j-0xa);
}
}
uart0_sent_msg(" ");
}
(2)cpu里的src目录里放置与arm920t内核相关的编程文件,inc目录放置相关头文件。
cpu/Makefile
#把src目录下的所有.c文件的字符串替换成.o字符串
TARGET := $(patsubst %.c,%.o,$(notdir $(wildcard ./src/*.c)) )
TARGET += $(patsubst %.S,%.o,$(notdir $(wildcard ./src/*.S)) )
all:$(TARGET)
echo "$(TARGET) 编译完成"
GPATH=$(PWD)
vpath %.c ./src
vpath %.S ./src
%.o:%.c
$(CC) $(INCLUDES) $(CPPFLAGS) $(CFLAGS) -c -o $@ $<
%.o:%.S
$(CC) $(INCLUDES) $(CPPFLAGS) $(CFLAGS) -c -o $@ $<
clean:
rm -f *.o
cpu/src
ClkConflg.S
#把src目录下的所有.c文件的字符串替换成.o字符串
TARGET := $(patsubst %.c,%.o,$(notdir $(wildcard ./src/*.c)) )
TARGET += $(patsubst %.S,%.o,$(notdir $(wildcard ./src/*.S)) )
all:$(TARGET)
echo "$(TARGET) 编译完成"
GPATH=$(PWD)
vpath %.c ./src
vpath %.S ./src
%.o:%.c
$(CC) $(INCLUDES) $(CPPFLAGS) $(CFLAGS) -c -o $@ $<
%.o:%.S
$(CC) $(INCLUDES) $(CPPFLAGS) $(CFLAGS) -c -o $@ $<
clean:
rm -f *.o
MemCofig.S
@与内存相关
.equ BWSCON , 0x48000000
.equ BANKCON6 , 0x4800001C
.equ REFRESH , 0x48000024
.equ BANKSIZE , 0x48000028
.equ MRSRB6 , 0x4800002C
.global MemConfigure
MemConfigure:
/*******内存初始化子程序*********/
@BWSCON[27:24] = 0 0 10B
ldr r0 , =BWSCON
ldr r1 , [r0]
ldr r2 , =(0x0F<<24)
bic r1 , r1 , r2
ldr r2 , =(0x02<<24)
orr r1 , r1 , r2
str r1 , [r0]
@BANKCON6[16:15]=11B,BANKCON6[3:0]=00 01B
ldr r0 , =BANKCON6
ldr r1 , [r0]
ldr r2 , =(0x03<<15)
bic r1 , r1 , r2
orr r1 , r1 , r2
ldr r2 , =0x0F
bic r1 , r1 , r2
ldr r2 , = 0x01
orr r1 , r1 , r2
str r1 , [r0]
@这里的Trp要大于20ns , Trc要大于70ns,HCLK=101.25MHz
@故时钟周期=1s/HCLK=9.8ns,Trp*9.8>20ns ==> Trp>=3 ==> Trp域=01b
@Trp*9.8+Tsrc*9.8>70ns ==> Tsrc>=5 ==> Tsrc域=01b
@REFRESH[23:18] = 1 0 01 01B,REFRESH[10:0] = 0x4E8
ldr r0 , =REFRESH
ldr r1 , [r0]
ldr r2 , =(0x3F<<18)
bic r1 , r1 , r2
ldr r2 , =(0x25<<18)
orr r1 , r1 , r2
ldr r2 , =0x7FF
bic r1 , r1 , r2
ldr r2 , =0x4E9
orr r1 , r1 , r2
str r1 , [r0]
@BANKSIZE[7:0] = 1 0 1 1 0 001 B
ldr r0 , =BANKSIZE
ldr r1 , [r0]
ldr r2 , =0xFF
bic r1 , r1 , r2
ldr r2 , =0xB1
orr r1 , r1 , r2
str r1 , [r0]
@MRSRB6[11:0] = 0 00 011 0 000 B
ldr r0 , =MRSRB6
ldr r1 , [r0]
ldr r2 , =0x3FF
bic r1 , r1 , r2
ldr r2 , =0x030
orr r1 , r1 , r2
str r1 , [r0]
bx lr @函数返回
/******END内存初始化子程序*******/
(3)根目录下的src放置其它通用源文件,inc放置通用头文件。
./inc/common.h
#ifndef _COMMON_H
#define _COMMON_H
#define u32 unsigned long
#define u8 unsigned char
/*****************声明外部变量********************/
extern unsigned int _wsnboot_start;
extern unsigned int _bss_start;
extern unsigned int _bss_end;
/*****************只使用类型***********/
#define sizeof(type) ( (unsigned long)( (type *)0 + 1 ) )
/********************粗略延时函数*******************/
inline void delay_s(volatile unsigned long second);
inline void delay_ms(volatile unsigned long time_ms);
unsigned int strlen( char *string );
char *strcpy(char *destAddr ,char *srcAddr);
/*************填充指定内存区域*********/
unsigned char *memclr(unsigned char *a ,unsigned int c, unsigned int len);
#endif
./inc/bootparams.h
#ifndef _BOOTPARAMS_H
#define _BOOTPARAMS_H
//参考uboot的setup.h文件
#define CONFIG_NR_DRAM_BANKS 1
#define tag_next(t) ((tag *)((u32 *)(t) + (t)->hdr.size))
#define tag_size(type) ((sizeof(tag_header) + sizeof(type)) >> 2)
enum {
ATAG_CORE = 0x54410001,
ATAG_MEM = 0x54410002,
ATAG_CMDLINE = 0x54410009,
ATAG_INITRD2 = 0x54410005,
ATAG_VIDEOLFB = 0x54410008,
ATAG_SERIAL = 0x54410006,
ATAG_REVISION = 0x54410007,
ATAG_NONE = 0x00000000
};
typedef struct tag_header {
u32 size;
u32 tag;
}tag_header;
typedef struct tag_core {
u32 flags; /* bit 0 = read-only */
u32 pagesize;
u32 rootdev;
}tag_core;
typedef struct tag_mem32 {
u32 size;
u32 start; /* physical start address */
}tag_mem32;
typedef struct tag_cmdline {
char cmdline[50]; /* this is the minimum size */
}tag_cmdline;
typedef struct tag {
tag_header hdr;
union {
tag_core core;
tag_mem32 mem;
tag_cmdline cmdline;
}u;
}tag ;
tag *setup_start_tag (tag *params);
tag *setup_memory_tags (tag *params);
tag *setup_commandline_tag (tag *params, char *commandline);
void setup_end_tag (tag *params);
tag *setParamsAddr( unsigned int paramsAddr , char *commandline );
#endif
./src/start.S
@与看门狗相关
.equ WTCON , 0x53000000
@与中断相关
.equ INTMSK , 0x4A000008
@与LED有关的
.equ GPBCON , 0x56000010
.equ GPBDAT , 0x56000014
.global _start
.global _wsnboot_start
.global _bss_start
.global _bss_end
.text
_start:
/***********设置中断向量表*************/
b ResetInit @复位异常入口
HandlerUndef:
ldr pc , =HandlerUndef @未定义异常入口
HandlerSWI:
ldr pc , =HandlerSWI @软中断异常入口
HandlerPabort:
ldr pc , =HandlerPabort @取指中止异常入口
HandlerDabort:
ldr pc , =HandlerDabort @数据中止异常入口
HandlerNotUsed:
ldr pc , =HandlerNotUsed @保留
ldr pc , =HandlerIRQ @中断异常入口
HandlerFIQ:
ldr pc , =HandlerFIQ @快中断异常入口
_wsnboot_start: .word _start
_bss_start: .word __bss_start
_bss_end: .word __bss_end
ResetInit:
/**************关闭看门狗**************/
ldr r0 , =WTCON
mov r1 , #0x0
str r1 , [r0]
/***************屏蔽中断***************/
ldr r0 , =INTMSK
ldr r1 , =0xffffffff
str r1 , [r0]
/*************初始化LED管脚************/
LedConf:
bl LedConfigure
/***************初始化时钟*************/
ClkConf:
bl ClkConfigure
/***************初始化内存*************/
MemConf:
bl MemConfigure
/***************清零bss段**************/
Clear_Bss:
bl clear_bss
/***************设置栈顶指针***********/
SetSp:
ldr sp , =0x34000000
/***重定位,设置传递给第二阶段的参数***/
CopyToSdram:
bl copy_bootloader_to_sdram @重定位之后,此时的运行地址跟链接地址还不一致。
/*************跳转到第二阶段***********/
jump:
ldr pc , =start_armboot @重定位之后,尽快让pc跳转到链接地址去执行,之后运行地址跟链接地址一致。
/**************************************/
loop: b loop
/*******************END************************/
/***********LED管脚初始化,利于调试***********/
LedConfigure:
@把LED1_2_3_4管脚置为输出
ldr r0 , =GPBCON
ldr r1 , [r0]
ldr r2 , =(0xFF<<10)
bic r1 , r1 ,r2
ldr r2 , =(0x55<<10)
orr r1 , r1 , r2
str r1 , [r0]
@灯全灭
ldr r0 , =GPBDAT
ldr r1 , [r0]
mov r2 , #(0x0F<<5)
orr r1 , r1 , r2
str r1 , [r0]
bx lr
/*****************清零bss段*******************/
clear_bss:
ldr r0 , =__bss_start
ldr r1 , =__bss_end
mov r2 , #0x0
clear: str r2 , [r0] , #4
cmp r0 , r1
ble clear @这里选择小于或等于就跳转,可以处理bss没有占用内存的情况
bx lr
/***************拷贝bootloader到sdram**********/
copy_bootloader_to_sdram:
mov r2 , #0x0 @r2保存了代码段的加载起始地址
ldr r0 , =_start @r0保存了代码的链接起始地址
ldr r1 , =__bss_start
sub r1 , r1 , r0 @r1保存代码段的大小
cmp r1 , #4096
ble copy_all @如果小于或等于4K就跳到copy执行,一次性拷完整个代码
copy_sram:
ldr r3 , [r2] , #4
str r3 , [r0] , #4
cmp r2 , #4096
bne copy_sram
mov r2 , #0x00 @r2:指明是否拷贝了所有代码(’0‘表示没拷完)
sub r1 , r1 , #4096 @r1:剩余要拷贝的代码大小
mov r0 , #4096 @r0:剩余代码的起始地址
bx lr
copy_all:
ldr r3 , [r2] , #4
str r3 , [r0] , #4
cmp r2 , r1
bne copy_all
mov r2 , #0x01 @r3=1表示代码已经拷完
bx lr
/**********LED调试*******************/
@灯全亮
ldr r0 , =GPBDAT
ldr r1 , [r0]
mov r2 , #(0x0F<<5)
bic r1 , r1 , r2
str r1 , [r0]
/************************************/
./src/boot.c
#include "uart0.h"
#include "nand.h"
#include "s3c2440.h"
#include "common.h"
#include "bootparams.h"
void start_armboot(unsigned int left_code_addr , unsigned int left_code_size , unsigned char is_left_code)
{
unsigned int destAddr;
tag *params;
volatile unsigned int *p;
/***************************声明一个函数指针,该函数指针为内核的启动函数的地址***********************/
void (*JumpToKenel)(int zero, int arch ,unsigned int params );
/***********************初始化串口0,用于bootloader调试用,也用于内核启动时信息打印******************/
uart0_init();
uart0_sent_msg("bootloader first stage is finish!!!\n\r");
uart0_sent_msg(" ............\n\r");
uart0_sent_msg("bootloader second stage is begin!!!\n\r");
/******************************************nand flash 的初始化****************************************/
dnand_init();
fnand_reset();
/**********************由第一阶段传递过来的参数判段是否还剩有代码需要被拷贝***************************/
if( 1 == is_left_code ) {
uart0_sent_msg("all the code is copy completed!!!!\n\r");
}else {
uart0_sent_msg("coping the left code!!!\n\r");
destAddr = _wsnboot_start + 4096 ; /******计算拷贝期间的中断地址*********/
fnand_readOfSize( (unsigned char *)destAddr , left_code_addr , left_code_size );
uart0_sent_msg("all the code is copy completed!!!!\n\r");
}
/*****************************************设置传递给内核的参数*****************************************/
uart0_sent_msg("setting the boot params......!!!!\n\r");
params = setParamsAddr( (unsigned int )0x30000100, "noinitrd root=/dev/mtdblock3 init=/linuxrc console=ttySAC0" ) ;
if( (0x30000100 == (unsigned long)params) ) {
uart0_sent_msg("boot params setting completed......!!!!\n\r");
}
/**************************************把内核从nand flash拷贝到sdram***********************************/
uart0_sent_msg("beging copying the kenel......!!!!\n\r");
fnand_readOfSize( (unsigned char *)0x30008000 , 0x60000 , 0x200000 );
p = (volatile unsigned int *)(0x30008000+80);
uart0_sent_hex_word(*p);
uart0_sent_msg("copying the kenel is completing....!!!!\n\r");
/**************************************跳转到内核起始地址执行内核**************************************/
uart0_sent_msg("boot the operating system , congratulations for you...!!!\n\r");
JumpToKenel = ( void (*)(int , int ,unsigned int ) )0x30008000 ;
JumpToKenel( 0 , 362 , (unsigned int )params );
uart0_sent_msg("boot the operating system fail...!!!\n\r");
while(1);
}
./src/common.c
#include "common.h"
inline void delay_s(volatile unsigned long second)
{
volatile unsigned long i;
while(second--){
i=1000000;
while(--i);
}
}
inline void delay_ms(volatile unsigned long time_ms)
{
volatile unsigned long i;
while(time_ms--){
i=1000;
while(--i);
}
}
/*************填充指定内存区域*********/
unsigned char *memclr(unsigned char *a ,unsigned int c, unsigned int len)
{
unsigned char *b = a;
do{
*a++ = c;
}while (--len);
return b;
}
unsigned int strlen( char *string )
{
unsigned int i=0;
while(*string != '\0'){
++string;
++i;
}
return i;
}
char *strcpy(char *destAddr ,char *srcAddr)
{
char *dest = destAddr;
while( (*destAddr++ = *srcAddr++ ) != '\0');
/*************最后加上字串结束标志符***********/
*dest = '\0';
return dest;
}
./src/common.c
#include "common.h"
inline void delay_s(volatile unsigned long second)
{
volatile unsigned long i;
while(second--){
i=1000000;
while(--i);
}
}
inline void delay_ms(volatile unsigned long time_ms)
{
volatile unsigned long i;
while(time_ms--){
i=1000;
while(--i);
}
}
/*************填充指定内存区域*********/
unsigned char *memclr(unsigned char *a ,unsigned int c, unsigned int len)
{
unsigned char *b = a;
do{
*a++ = c;
}while (--len);
return b;
}
unsigned int strlen( char *string )
{
unsigned int i=0;
while(*string != '\0'){
++string;
++i;
}
return i;
}
char *strcpy(char *destAddr ,char *srcAddr)
{
char *dest = destAddr;
while( (*destAddr++ = *srcAddr++ ) != '\0');
/*************最后加上字串结束标志符***********/
*dest = '\0';
return dest;
}
./src/pootparams.c
#include "common.h"
#include "bootparams.h"
#include "uart0.h"
tag *setup_start_tag (tag *params)
{
params->hdr.tag = ATAG_CORE;
params->hdr.size = tag_size(tag_core);
params->u.core.flags = 0;
params->u.core.pagesize = 0;
params->u.core.rootdev = 0;
params = (tag *)tag_next(params);
return params;
}
tag *setup_memory_tags (tag *params)
{
int i;
for (i = 0; i < CONFIG_NR_DRAM_BANKS; i++) {
params->hdr.tag = ATAG_MEM;
params->hdr.size = tag_size (tag_mem32);
params->u.mem.start = 0x30000000;
params->u.mem.size = 0x4000000;
params = (tag *)tag_next (params);
}
return params;
}
tag *setup_commandline_tag (tag *params, char *commandline)
{
params->hdr.tag = ATAG_CMDLINE;
params->hdr.size = (sizeof (struct tag_header) + strlen (commandline) + 1 + 3) >> 2;
strcpy (params->u.cmdline.cmdline, commandline);
uart0_sent_msg("boot params = ");
uart0_sent_msg(params->u.cmdline.cmdline);
uart0_sent_msg("\n\r");
params = (tag *)tag_next (params);
return params;
}
void setup_end_tag (tag *params)
{
params->hdr.tag = ATAG_NONE;
params->hdr.size = 0;
}
tag *setParamsAddr( unsigned int paramsAddr , char *commandline )
{
tag *params = (tag *)memclr( (unsigned char *)paramsAddr , 0 , (unsigned int)sizeof(tag) );
params = setup_start_tag (params);
params = setup_memory_tags (params);
params = setup_commandline_tag(params , commandline);
setup_end_tag (params);
return (tag *)paramsAddr;
}
(4)一级makefile跟链接脚本都放在根目录下。
./Makefile
ifndef CROSS_COMPILE
CROSS_COMPILE = arm-linux-
endif
export CROSS_COMPILE
ifndef XECHO
XECHO = echo
endif
export XECHO
ifndef LKSCRIPT
LKSCRIPT = wsnboot.lds
endif
ifndef OUTPUTNAME
OUTPUTNAME = wsnboot
endif
TOPTREE = $(PWD)
SRCDIRS := $(TOPTREE)/src $(TOPTREE)/cpu/src $(TOPTREE)/drivers/src
OBJDIRS := $(TOPTREE) $(TOPTREE)/cpu $(TOPTREE)/drivers
INCDIRS := $(TOPTREE)/inc $(TOPTREE)/cpu/inc $(TOPTREE)/drivers/inc
INCLUDES:= $(addprefix -I,${INCDIRS})
SUBDIRS := $(TOPTREE)/cpu $(TOPTREE)/drivers
OUTPUTDIR= $(TOPTREE)/output
export TOPTREE SRCDIRS OBJDIRS INCDIRS INCLUDES
#函数foreach把OBJDIRS中的单词逐个放在OBJTREE临时变量里,然后执行第三个参数(表达式),
#一直到OBJDIRS中的单词被取完,把表达式多次返回的结果都返回。
OBJS := $(patsubst %.c, %.o, $(foreach OBJTREE,${SRCDIRS},$(notdir $(wildcard ${OBJTREE}/*.c))))
OBJS += $(patsubst %.S, %.o, $(foreach OBJTREE,${SRCDIRS},$(notdir $(wildcard ${OBJTREE}/*.S))))
GPATH=$(PWD)
vpath %.o $(OBJDIRS)
vpath %.c $(SRCDIRS)
vpath %.S $(SRCDIRS)
AR = $(CROSS_COMPILE)ar
AS = $(CROSS_COMPILE)as
CC = $(CROSS_COMPILE)gcc
LD = $(CROSS_COMPILE)ld
OBJDUMP = $(CROSS_COMPILE)objdump
OBJCOPY = $(CROSS_COMPILE)objcopy
export AR AS CC LD OBJDUMP OBJCOPY
MAKE = make
CFLAGS := -Wall -O2
CPPFLAGS :=-nostdinc -nostdlib -fno-builtin
export MAKE CFLAGS CPPFLAGS
subdirs:
@for dir in $(SUBDIRS) ; do\
$(MAKE) -C $$dir ;\
done
$(MAKE) $(OUTPUTNAME).bin
$(OUTPUTNAME).bin:$(OBJS)
@$(XECHO) "链接开始"
$(LD) -T$(LKSCRIPT) -o $(OUTPUTDIR)/$(OUTPUTNAME).elf $^
$(OBJCOPY) -O binary -S $(OUTPUTDIR)/$(OUTPUTNAME).elf $(OUTPUTDIR)/$@
$(OBJDUMP) -D -m arm $(OUTPUTDIR)/$(OUTPUTNAME).elf \
> $(OUTPUTDIR)/$(OUTPUTNAME).dis
@$(XECHO) "链接已完成!!!!目标生成在output目录下....."
%.o:%.c
$(CC) $(INCLUDES) $(CPPFLAGS) $(CFLAGS) -c -o $@ $<
%.o:%.S
$(CC) $(INCLUDES) $(CPPFLAGS) $(CFLAGS) -c -o $@ $<
clean:
@for dir in $(SUBDIRS) ; do\
$(MAKE) clean -C $$dir ;\
done
rm -f *.o *.bin *.bak *.elf *.dis $(OUTPUTDIR)/*
./wsnboot.lds
/*指定输出机器架构为arm*/
OUTPUT_ARCH(arm)
/*设置入口点*/
ENTRY(_start)
SECTIONS
{
. = 0x33f80000;
. = ALIGN(4);
_start = . ;
.text :
{
start.o(.text)
./cpu/*.o(.text)
*(.text)
}
. = ALIGN(4);
.rodata : {*(.rodata)}
. = ALIGN(4);
.data : {*(.data)}
. = ALIGN(4);
__bss_start = . ;
.bss : {*(.bss) *(COMMON)}
__bss_end = . ;
}
(5)最终的bin输出文件被输出到output里。